
Completion requirements
Stato GNSS
INIZIO
Indice
Descrizione dei parametri
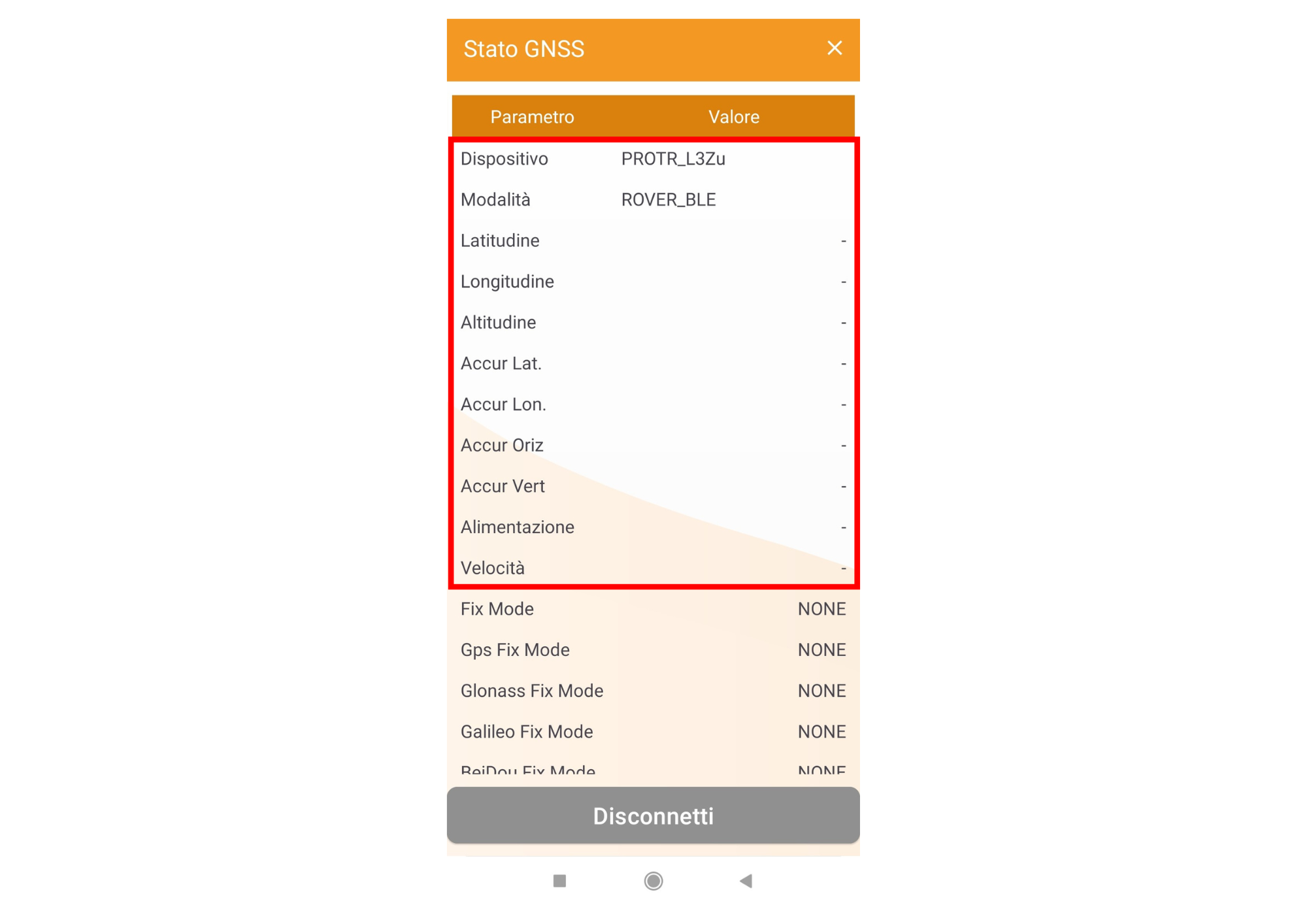
Dispositivo
Nome del ricevitore GNSS collegato all’applicazione.
Modalità
Indica la configurazione operativa del ricevitore (es. Rover BLE, Base, Base+Rover).
Latitudine / Longitudine
Coordinate geografiche correnti rilevate dal ricevitore GNSS.
Altitudine
Quota altimetrica calcolata dal sistema GNSS.
Accur Lat. / Accur Lon.
Precisione stimata sulle coordinate di latitudine e longitudine.
Accur Oriz
Accuratezza orizzontale complessiva della posizione.
Accur Vertv
Accuratezza verticale stimata.
Alimentazione
Stato energetico del dispositivo GNSS collegato.
Velocità
Velocità di spostamento calcolata sulla base delle soluzioni GNSS.
Stato del Fix e Costellazioni
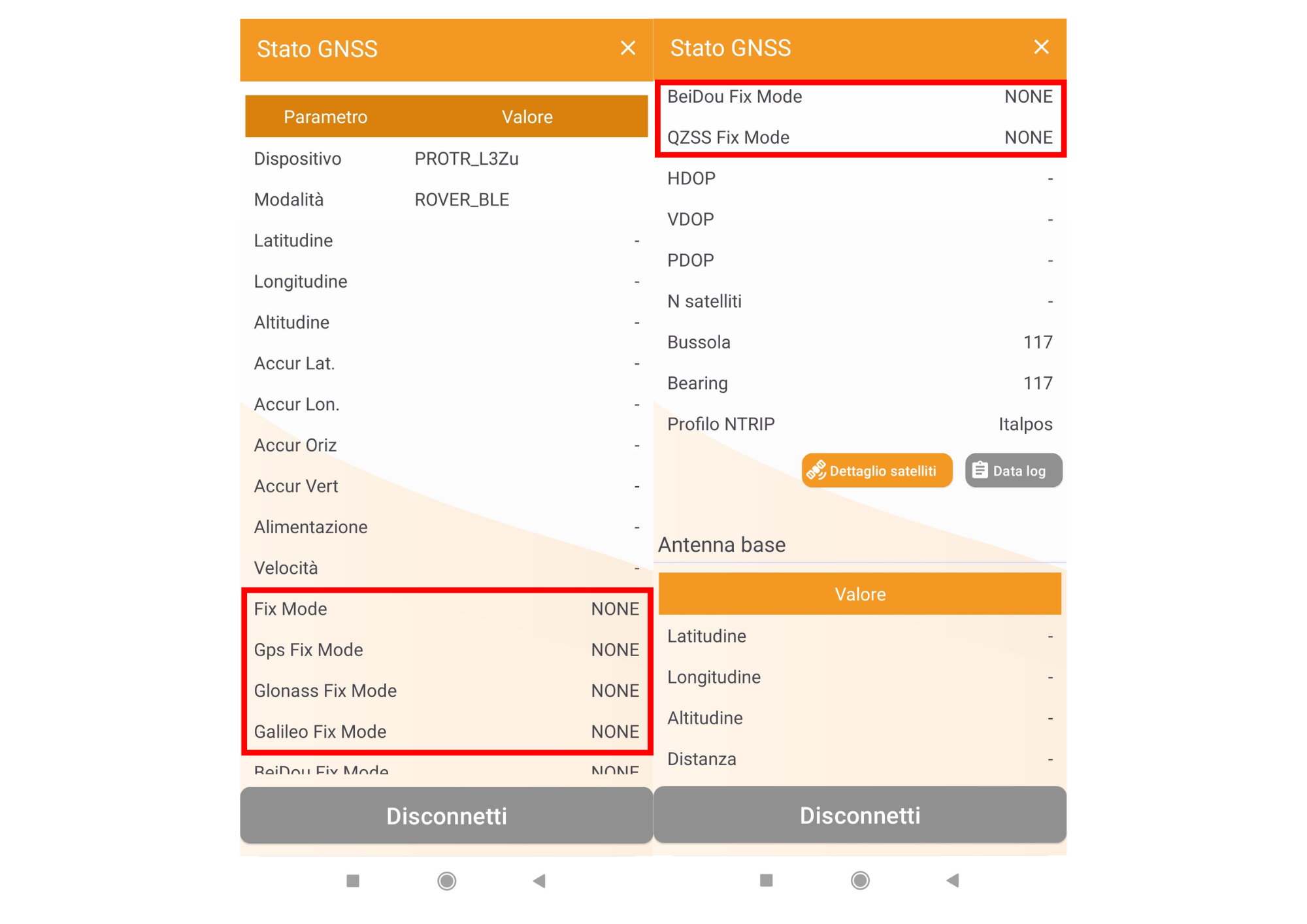
Fix Mode
Tipo di soluzione GNSS attiva (es. NONE, SINGLE, FLOAT, FIX).
GPS Fix Mode
Stato del fix relativo alla costellazione GPS.
Glonass Fix Mode
Stato del fix relativo alla costellazione GLONASS.
Galileo Fix Mode
Stato del fix relativo ai satelliti Galileo.
BeiDou Fix Mode
Stato del fix relativo ai satelliti BeiDou.
QZSS Fix Mode
Stato del fix relativo alla costellazione QZSS.
Indicatori di qualità del segnale
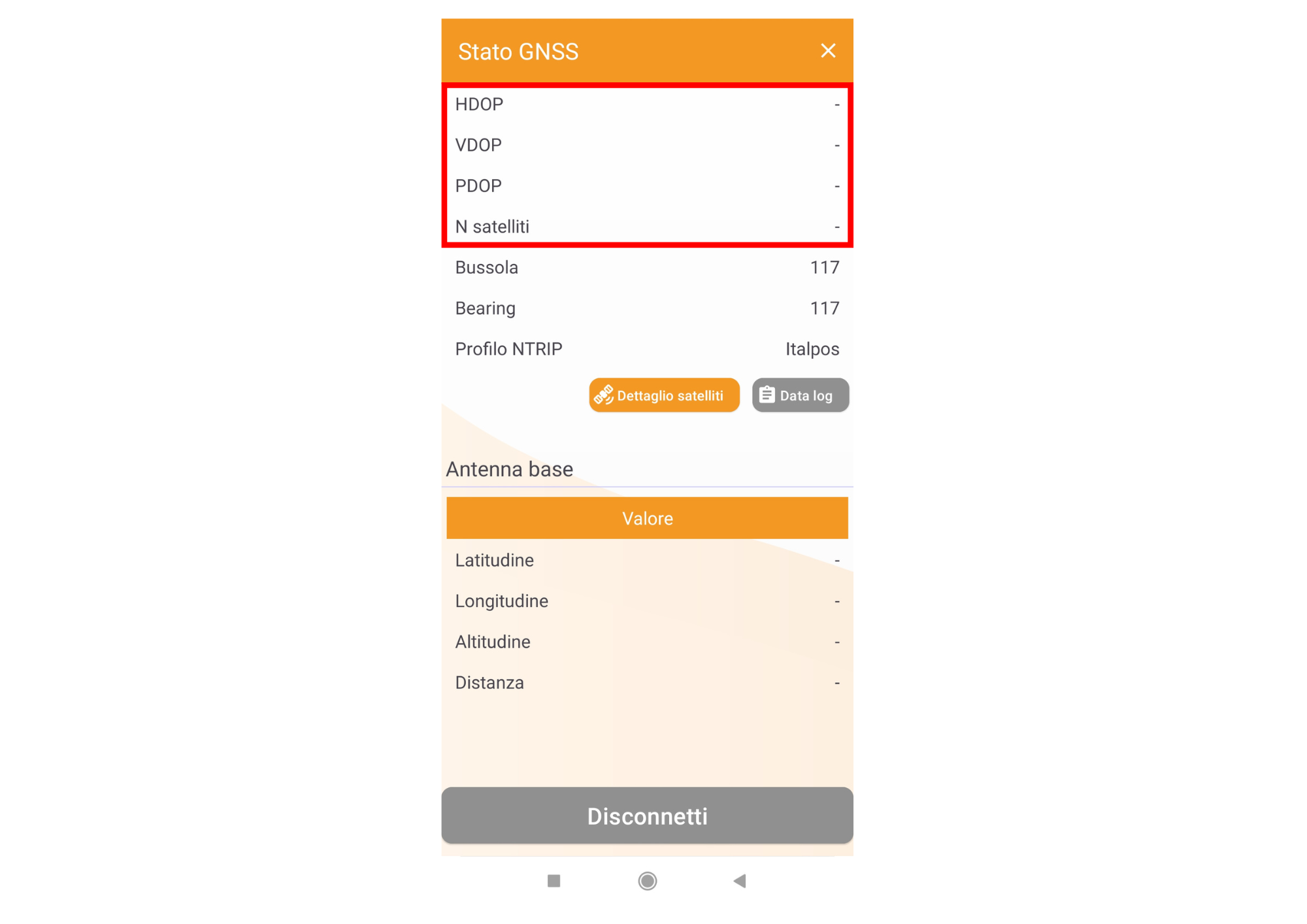
- HDOP: Indice di diluizione orizzontale della precisione; valori più bassi indicano migliore geometria satellitare.
- VDOP: Indice di precisione verticale.
- PDOP: Indice complessivo della qualità geometrica del segnale GNSS.
- N satelliti: Numero di satelliti attualmente utilizzati per il calcolo della posizione.
Orientamento e rete di correzione
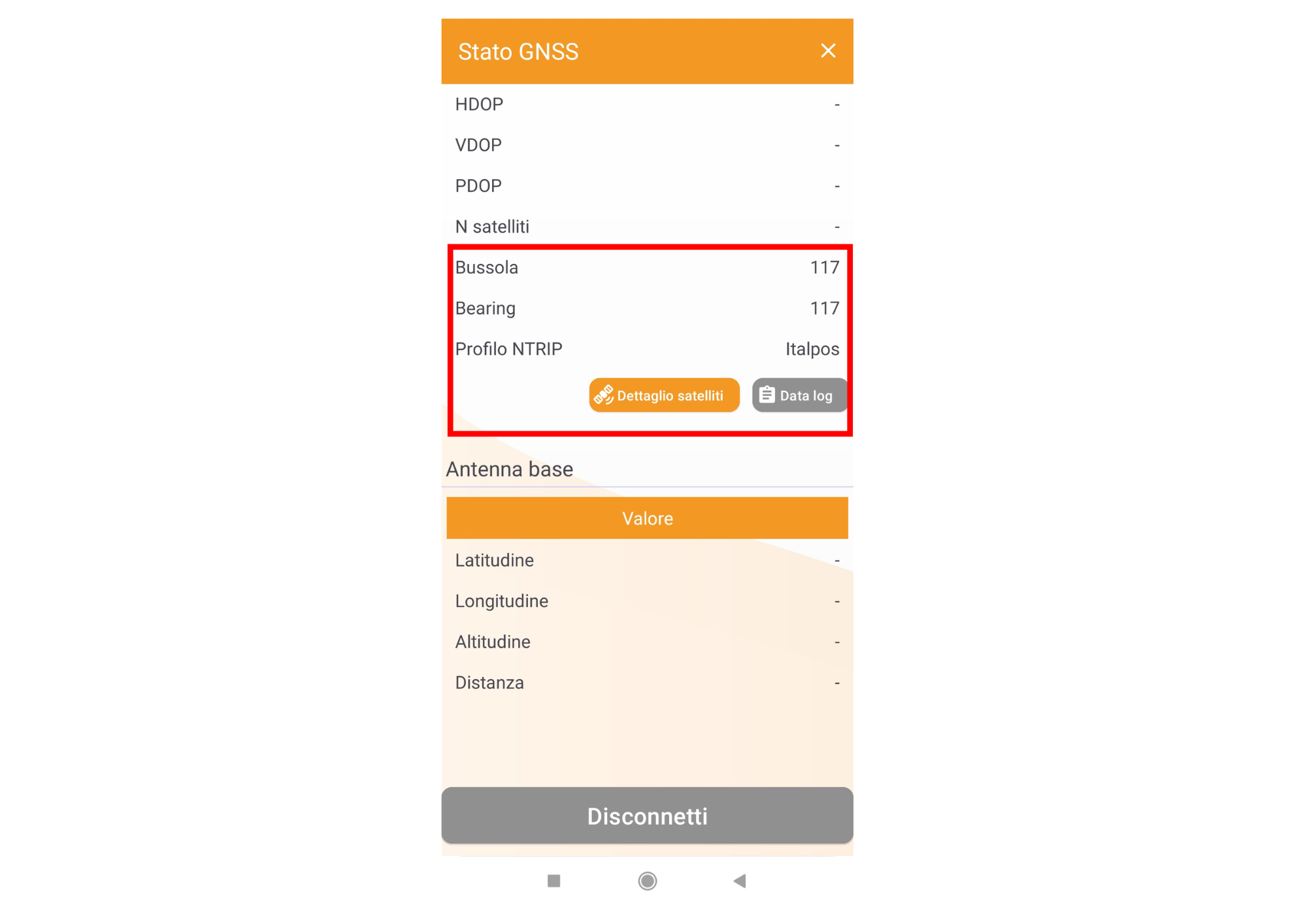
- Bussola: Direzione rilevata dai sensori del dispositivo in gradi.
- Bearing: Direzione di movimento calcolata dal GNSS.
- Profilo NTRIP: Nome del profilo di rete utilizzato per ricevere le correzioni RTK.
- Dettaglio satelliti: Apre la schermata con le informazioni avanzate sui satelliti agganciati.
- Data log: Consente l’accesso ai log dei dati GNSS registrati.
Antenna base
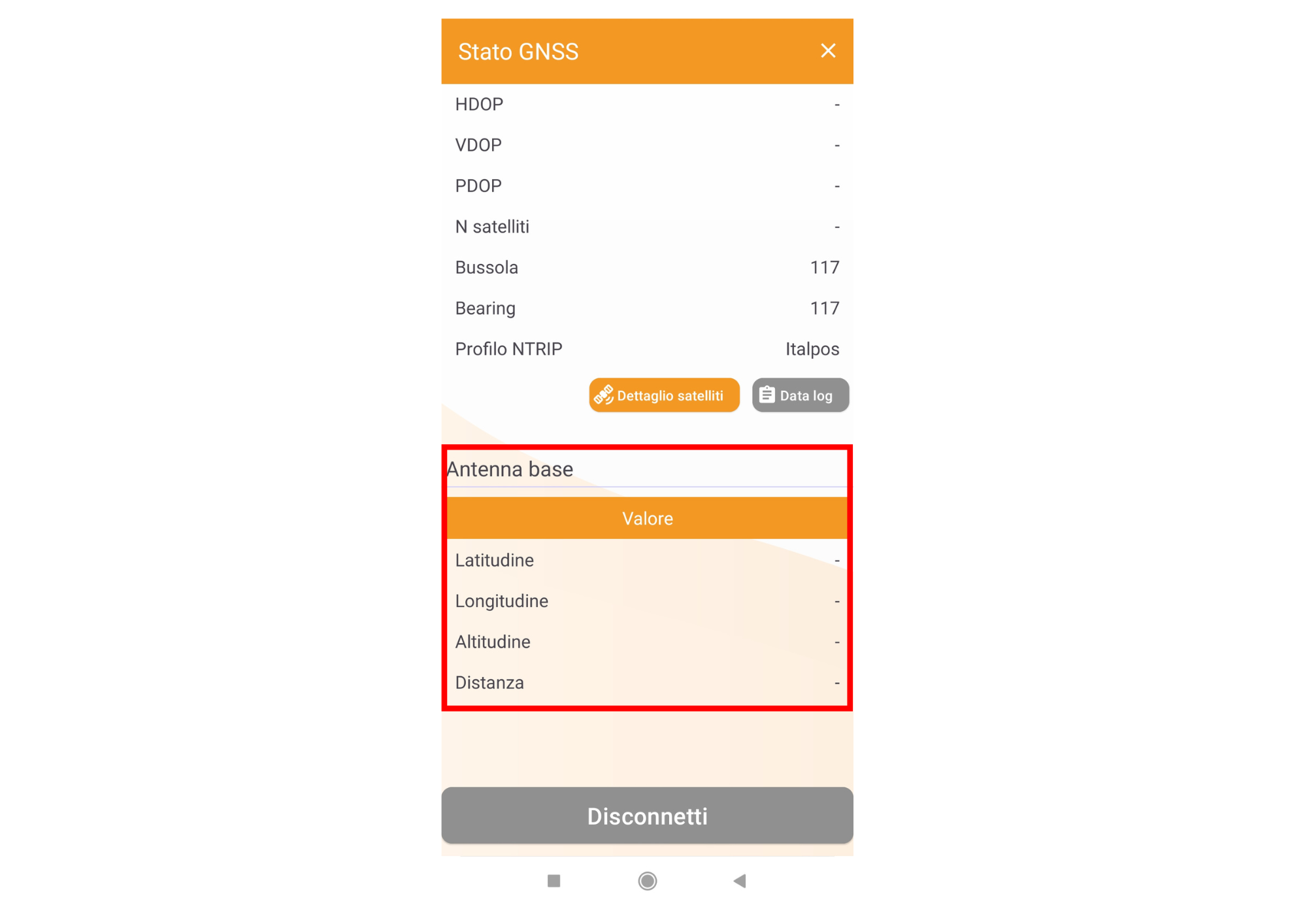
Latitudine / Longitudine / Altitudine
Coordinate della base GNSS utilizzata per le correzioni.
Distanza
Distanza stimata tra rover e antenna base.
Last modified: Monday, 2 March 2026, 4:04 PM